Hvordan lage en AI av en hjort i enhet
I spillutvikling betyr å legge til Artificial Intelligence å skrive kode som vil kontrollere spillenheten uten ekstern input.
Animal AI in games er en gren av AI som har som mål å oversette dyreadferd til spillets digitale miljø for å skape en realistisk opplevelse.
I denne opplæringen vil jeg vise hvordan du lager et enkelt dyr (hjort) AI i Unity som vil ha to tilstander, inaktiv og flykt.
Trinn 1: Forbered scenen og hjortemodellen
Vi vil trenge et nivå og en hjortmodell.
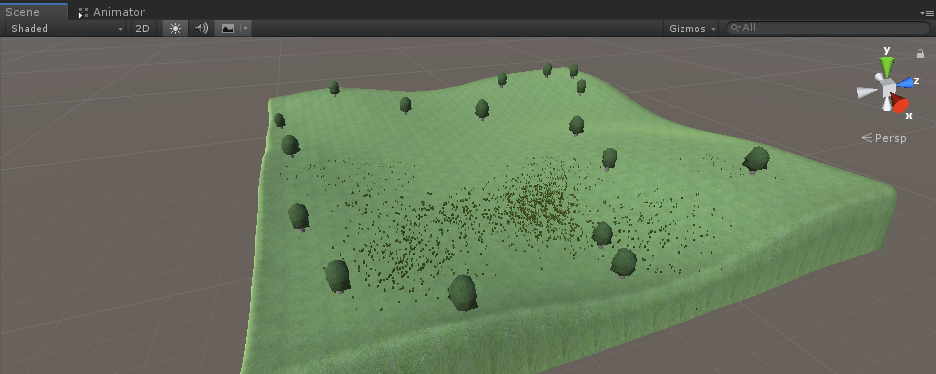
For nivået vil jeg bruke et enkelt terreng med litt gress og trær:
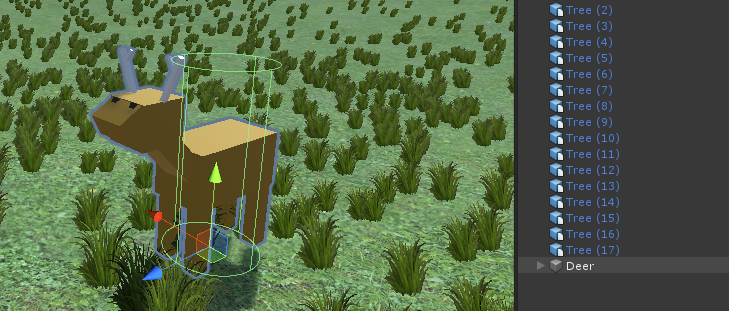
For hjortmodellen kombinerte jeg ganske enkelt noen kuber (men du kan bruke denne hjortmodellen):

La oss nå gå til kodingsdelen.
Trinn 2: Konfigurer spillerkontrolleren
Vi begynner med å sette opp en spillerkontroller slik at vi kan gå rundt og teste AI:
- Opprett et nytt skript, navngi det SC_CharacterController og lim inn koden nedenfor i det:
SC_CharacterController.cs
using UnityEngine;
[RequireComponent(typeof(CharacterController))]
public class SC_CharacterController : MonoBehaviour
{
public float speed = 7.5f;
public float jumpSpeed = 8.0f;
public float gravity = 20.0f;
public Camera playerCamera;
public float lookSpeed = 2.0f;
public float lookXLimit = 45.0f;
CharacterController characterController;
Vector3 moveDirection = Vector3.zero;
Vector2 rotation = Vector2.zero;
[HideInInspector]
public bool canMove = true;
void Start()
{
characterController = GetComponent<CharacterController>();
rotation.y = transform.eulerAngles.y;
}
void Update()
{
if (characterController.isGrounded)
{
// We are grounded, so recalculate move direction based on axes
Vector3 forward = transform.TransformDirection(Vector3.forward);
Vector3 right = transform.TransformDirection(Vector3.right);
float curSpeedX = speed * Input.GetAxis("Vertical");
float curSpeedY = speed * Input.GetAxis("Horizontal");
moveDirection = (forward * curSpeedX) + (right * curSpeedY);
if (Input.GetButton("Jump"))
{
moveDirection.y = jumpSpeed;
}
}
// Apply gravity. Gravity is multiplied by deltaTime twice (once here, and once below
// when the moveDirection is multiplied by deltaTime). This is because gravity should be applied
// as an acceleration (ms^-2)
moveDirection.y -= gravity * Time.deltaTime;
// Move the controller
characterController.Move(moveDirection * Time.deltaTime);
// Player and Camera rotation
if (canMove)
{
rotation.y += Input.GetAxis("Mouse X") * lookSpeed;
rotation.x += -Input.GetAxis("Mouse Y") * lookSpeed;
rotation.x = Mathf.Clamp(rotation.x, -lookXLimit, lookXLimit);
playerCamera.transform.localRotation = Quaternion.Euler(rotation.x, 0, 0);
transform.eulerAngles = new Vector2(0, rotation.y);
}
}
}![]()
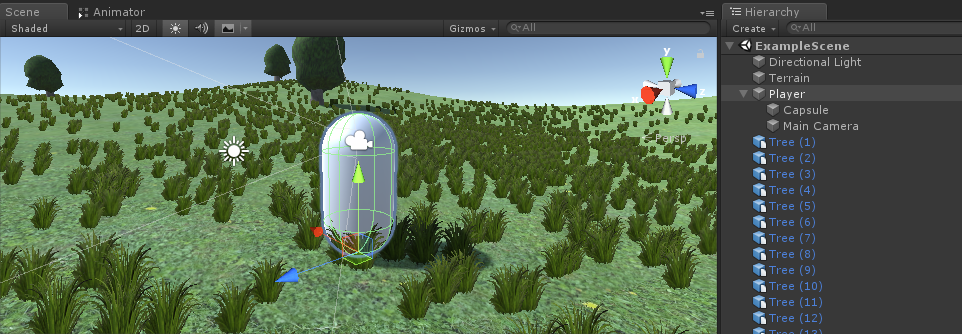
- Opprett et nytt GameObject og navngi det "Player" og endre taggen til "Player"
- Lag en ny kapsel (GameObject -> 3D-objekt -> Capsule), og gjør den til et underordnet objekt av "Player"-objektet, endre posisjonen til (0, 1, 0), og fjern dens CapsuleCollider-komponent.
- Flytt hovedkameraet inne i "Player"-objektet og endre dets posisjon til (0, 1.64, 0)
- Fest SC_CharacterController-skript til et "Player"-objekt (Du vil legge merke til at det også vil legge til en annen komponent kalt Character Controller. Sett senterverdien til (0, 1, 0))
- Tilordne hovedkameraet til variabelen "Player Camera" ved SC_CharacterController og deretter lagre scenen
Spillerkontrolleren er nå klar.
Trinn 3: Programmer Deer AI
La oss nå gå til delen hvor vi programmerer en Deer AI:
- Lag et nytt skript og gi det navnet SC_DeerAI (dette skriptet vil kontrollere AI-bevegelsen):
![]()
Åpne SC_DeerAI og fortsett trinnene nedenfor:
Ved starten av skriptet sørger vi for at alle nødvendige klasser er inkludert (spesifikt UnityEngine.AI):
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{La oss nå legge til alle variablene:
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>(); Deretter initialiserer vi alt i den tomme Start():
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}(Som du kan se legger vi til en Sphere Collider som er merket som Trigger. Denne kollideren vil fungere som et bevissthetsområde når fienden kommer inn i det).
Selve AI-logikken gjøres i void Update() med noen hjelpefunksjoner:
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}(Hver tilstand initialiserer verdiene og NavMesh Agent-målet for neste tilstand. For eksempel har Idle-tilstanden 2 mulige utfall, den initialiserer enten Running-tilstanden hvis fienden er tilstede eller spisetilstanden hvis ingen fiende krysset bevissthetsområdet.
En gåtilstand brukes mellom spisetilstandene for å flytte til den nye destinasjonen.
Løpetilstand beregner retningen i forhold til fiendens posisjon, for å løpe direkte fra den.
Hvis den sitter fast i hjørnet, trekker AI seg tilbake til en av de tidligere lagrede tomgangsposisjonene. Fienden er tapt etter at AI er langt nok fra fienden).
Og til slutt legger vi til en OnTriggerEnter-hendelse som vil overvåke Sphere Collider (aka Awareness Area) og vil initialisere Running-tilstanden når fienden kommer for nærme:
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}Så snart spilleren går inn i utløseren, tilordnes fiendens variabel og Idle-tilstanden initialiseres, etter det initialiseres Running-tilstanden.
Nedenfor er det endelige SC_DeerAI.cs-skriptet:
//You are free to use this script in Free or Commercial projects
//sharpcoderblog.com @2019
using UnityEngine;
using UnityEngine.AI;
using System.Collections.Generic;
public class SC_DeerAI : MonoBehaviour
{
public enum AIState { Idle, Walking, Eating, Running }
public AIState currentState = AIState.Idle;
public int awarenessArea = 15; //How far the deer should detect the enemy
public float walkingSpeed = 3.5f;
public float runningSpeed = 7f;
public Animator animator;
//Trigger collider that represents the awareness area
SphereCollider c;
//NavMesh Agent
NavMeshAgent agent;
bool switchAction = false;
float actionTimer = 0; //Timer duration till the next action
Transform enemy;
float range = 20; //How far the Deer have to run to resume the usual activities
float multiplier = 1;
bool reverseFlee = false; //In case the AI is stuck, send it to one of the original Idle points
//Detect NavMesh edges to detect whether the AI is stuck
Vector3 closestEdge;
float distanceToEdge;
float distance; //Squared distance to the enemy
//How long the AI has been near the edge of NavMesh, if too long, send it to one of the random previousIdlePoints
float timeStuck = 0;
//Store previous idle points for reference
List<Vector3> previousIdlePoints = new List<Vector3>();
// Start is called before the first frame update
void Start()
{
agent = GetComponent<NavMeshAgent>();
agent.stoppingDistance = 0;
agent.autoBraking = true;
c = gameObject.AddComponent<SphereCollider>();
c.isTrigger = true;
c.radius = awarenessArea;
//Initialize the AI state
currentState = AIState.Idle;
actionTimer = Random.Range(0.1f, 2.0f);
SwitchAnimationState(currentState);
}
// Update is called once per frame
void Update()
{
//Wait for the next course of action
if (actionTimer > 0)
{
actionTimer -= Time.deltaTime;
}
else
{
switchAction = true;
}
if (currentState == AIState.Idle)
{
if(switchAction)
{
if (enemy)
{
//Run away
agent.SetDestination(RandomNavSphere(transform.position, Random.Range(1, 2.4f)));
currentState = AIState.Running;
SwitchAnimationState(currentState);
}
else
{
//No enemies nearby, start eating
actionTimer = Random.Range(14, 22);
currentState = AIState.Eating;
SwitchAnimationState(currentState);
//Keep last 5 Idle positions for future reference
previousIdlePoints.Add(transform.position);
if (previousIdlePoints.Count > 5)
{
previousIdlePoints.RemoveAt(0);
}
}
}
}
else if (currentState == AIState.Walking)
{
//Set NavMesh Agent Speed
agent.speed = walkingSpeed;
// Check if we've reached the destination
if (DoneReachingDestination())
{
currentState = AIState.Idle;
}
}
else if (currentState == AIState.Eating)
{
if (switchAction)
{
//Wait for current animation to finish playing
if(!animator || animator.GetCurrentAnimatorStateInfo(0).normalizedTime - Mathf.Floor(animator.GetCurrentAnimatorStateInfo(0).normalizedTime) > 0.99f)
{
//Walk to another random destination
agent.destination = RandomNavSphere(transform.position, Random.Range(3, 7));
currentState = AIState.Walking;
SwitchAnimationState(currentState);
}
}
}
else if (currentState == AIState.Running)
{
//Set NavMesh Agent Speed
agent.speed = runningSpeed;
//Run away
if (enemy)
{
if (reverseFlee)
{
if (DoneReachingDestination() && timeStuck < 0)
{
reverseFlee = false;
}
else
{
timeStuck -= Time.deltaTime;
}
}
else
{
Vector3 runTo = transform.position + ((transform.position - enemy.position) * multiplier);
distance = (transform.position - enemy.position).sqrMagnitude;
//Find the closest NavMesh edge
NavMeshHit hit;
if (NavMesh.FindClosestEdge(transform.position, out hit, NavMesh.AllAreas))
{
closestEdge = hit.position;
distanceToEdge = hit.distance;
//Debug.DrawLine(transform.position, closestEdge, Color.red);
}
if (distanceToEdge < 1f)
{
if(timeStuck > 1.5f)
{
if(previousIdlePoints.Count > 0)
{
runTo = previousIdlePoints[Random.Range(0, previousIdlePoints.Count - 1)];
reverseFlee = true;
}
}
else
{
timeStuck += Time.deltaTime;
}
}
if (distance < range * range)
{
agent.SetDestination(runTo);
}
else
{
enemy = null;
}
}
//Temporarily switch to Idle if the Agent stopped
if(agent.velocity.sqrMagnitude < 0.1f * 0.1f)
{
SwitchAnimationState(AIState.Idle);
}
else
{
SwitchAnimationState(AIState.Running);
}
}
else
{
//Check if we've reached the destination then stop running
if (DoneReachingDestination())
{
actionTimer = Random.Range(1.4f, 3.4f);
currentState = AIState.Eating;
SwitchAnimationState(AIState.Idle);
}
}
}
switchAction = false;
}
bool DoneReachingDestination()
{
if (!agent.pathPending)
{
if (agent.remainingDistance <= agent.stoppingDistance)
{
if (!agent.hasPath || agent.velocity.sqrMagnitude == 0f)
{
//Done reaching the Destination
return true;
}
}
}
return false;
}
void SwitchAnimationState(AIState state)
{
//Animation control
if (animator)
{
animator.SetBool("isEating", state == AIState.Eating);
animator.SetBool("isRunning", state == AIState.Running);
animator.SetBool("isWalking", state == AIState.Walking);
}
}
Vector3 RandomNavSphere(Vector3 origin, float distance)
{
Vector3 randomDirection = Random.insideUnitSphere * distance;
randomDirection += origin;
NavMeshHit navHit;
NavMesh.SamplePosition(randomDirection, out navHit, distance, NavMesh.AllAreas);
return navHit.position;
}
void OnTriggerEnter(Collider other)
{
//Make sure the Player instance has a tag "Player"
if (!other.CompareTag("Player"))
return;
enemy = other.transform;
actionTimer = Random.Range(0.24f, 0.8f);
currentState = AIState.Idle;
SwitchAnimationState(currentState);
}
}- Plasser Hjortemodellen i scenen og fest en NavMesh Agent, SC_DeerAI-skript og Animator-komponent til den:
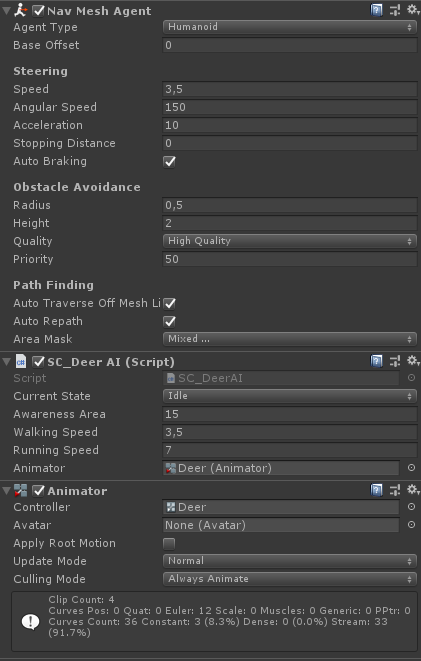
SC_DeerAI har bare én variabel som må tilordnes som er "Animator".
Animatørkomponenten krever en kontroller med 4 animasjoner: Idle Animation, Walking Animation, Eating Animation og Running Animation, og 3 bool-parametere: isEating, isRunning og isWalking:
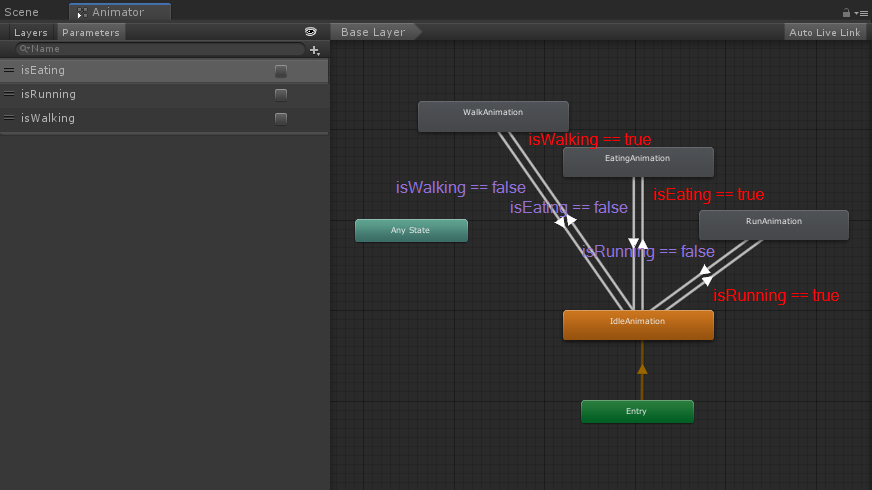
Du kan lære hvordan du setter opp en enkel animatorkontroller ved å klikke her
Etter at alt er tildelt er det en siste ting igjen å gjøre, som er å bake en NavMesh.
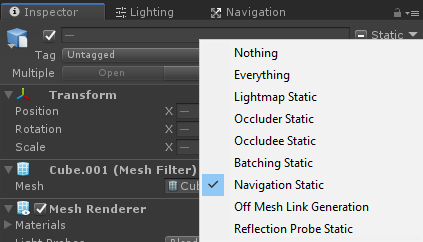
- Velg alle sceneobjektene som skal være statiske (f.eks. terreng, trær osv.) og merk dem som "Navigation Static":
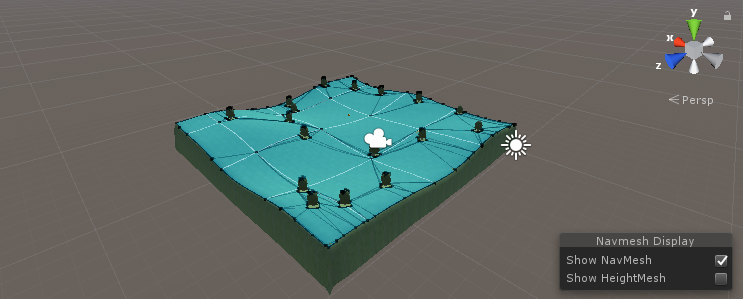
- Gå til navigasjonsvinduet (Vindu -> AI -> Navigasjon) og klikk på fanen "Bake" og klikk deretter på "Bake"-knappen. Etter at NavMesh er bakt skal det se omtrent slik ut:
Etter at NavMesh ble bakt, kan vi teste AI:

Alt fungerer som forventet. Hjorten stikker av når fienden er nær og gjenopptar sine vanlige aktiviteter når fienden er langt nok.